CAD · Aug 2023 to Jun 2024
UVA Rocketry: Spaceport America Cup 2024
Design, simulation, and build for Sabre I, the UVA Rocketry Team's entry in the 10K COTS class at Spaceport America Cup 2024. Finished 37th in class and 60th overall at the club's debut competition.
The rocket
Sabre I was the UVA Rocketry Team's first entry into Spaceport America Cup, the world's largest intercollegiate rocketry competition. We competed in the 10K COTS category (a 10,000 ft apogee target on a commercial-off-the-shelf solid motor) and had to carry the full SAC engineering process: team proposal, Preliminary Design Review, Critical Design Review, a certifying test launch, and a Video Flight Readiness Review before the launch window in New Mexico.
| Spec | Value |
|---|---|
| Height | 11.3 ft |
| Diameter | 6 in |
| Launch mass | 65.7 lb |
| Motor | Aerotech M2500 (98 mm) |
| Airframe | G12 fiberglass |
| Fins | Carbon-fiber-reinforced G10 fiberglass |
My role and contributions
I worked as a CAD designer across aerostructures, recovery, propulsion, and payload subteams. My main contributions were in SolidWorks (primary CAD and fabrication drawings) and OpenRocket (flight simulation, stability analysis, and fin optimization), plus hands-on build and test support through the spring campaign leading up to the competition.
Technical approach
SolidWorks owned primary CAD, assembly structure, and fab drawings. OpenRocket handled flight simulation for stability margin, apogee prediction, and fin geometry iteration. The loop was tight by design: any change to fins, payload mass, or nose-cone geometry flowed from CAD directly into a new OpenRocket run so we could see its effect on stability calibers and predicted apogee before committing hardware. The balance we were managing on every iteration was drag versus stability margin versus structural load, while keeping recovery and payload interfaces compatible with the airframe we could actually build.
OpenRocket: iterate fin geometry -> stability calibers -> apogee band
SolidWorks: hardware ownership, assembly checks, drawings for fab
Two subassemblies dominated the CAD iteration. The nosecone sets drag shape and has to house enough internal volume for the recovery system, so its geometry is where apogee performance and recovery packaging collide:
Fins were the main lever on stability margin and apogee, so the fin subassembly was the one that moved most often between CAD and OpenRocket as we swept planform geometry:
The electronics bay and payload subassembly is where Structures, Flight Performance, and Electronics all had to agree: it had to fit inside the airframe, mount the avionics cleanly for the Electronics subteam, and keep mass and center-of-gravity inside the flight-sim budget.
Flight performance
Flight Performance covered everything the rocket had to do between ignition and touchdown: stability, apogee, and recovery. I worked inside this thread through OpenRocket as the main simulation tool, supporting the Flight Performance subteam (lead: Anne Marie Branch) with fin sweeps, mass and center-of-gravity checks, and stability calibration runs feeding straight out of the SolidWorks master model.
Concretely, the workflow was:
- Fin planform sweep: iterate trapezoidal fin root, tip, and sweep in SolidWorks, update the OpenRocket rocket file from the master CAD, and rerun stability + apogee. Target window was a stability margin that kept the rocket from weather-cocking or over-correcting while staying close to the 10,000 ft apogee ceiling for the 10K COTS class.
- Mass and CG budget: every change in nosecone packaging or payload layout fed back into the mass estimate, which shifts center of gravity and therefore stability margin. OpenRocket was the fast way to check that any CAD decision was still flight-viable before committing to machining time.
- Recovery simulation: apogee prediction, drogue-to-main deployment altitude, and descent rate had to come in under the competition recovery rules and within the recovery hardware's rated limits. These were OpenRocket runs with the full motor burn curve and recovery event timing.
- Test-flight validation: the April 2024 test launch of Sabre I (apogee over 3,200 ft on a smaller motor) was the real ground truth for the sim. Comparing the measured flight trace against the OpenRocket prediction was the calibration step that told us how much to trust the simulation for the 10K competition flight.
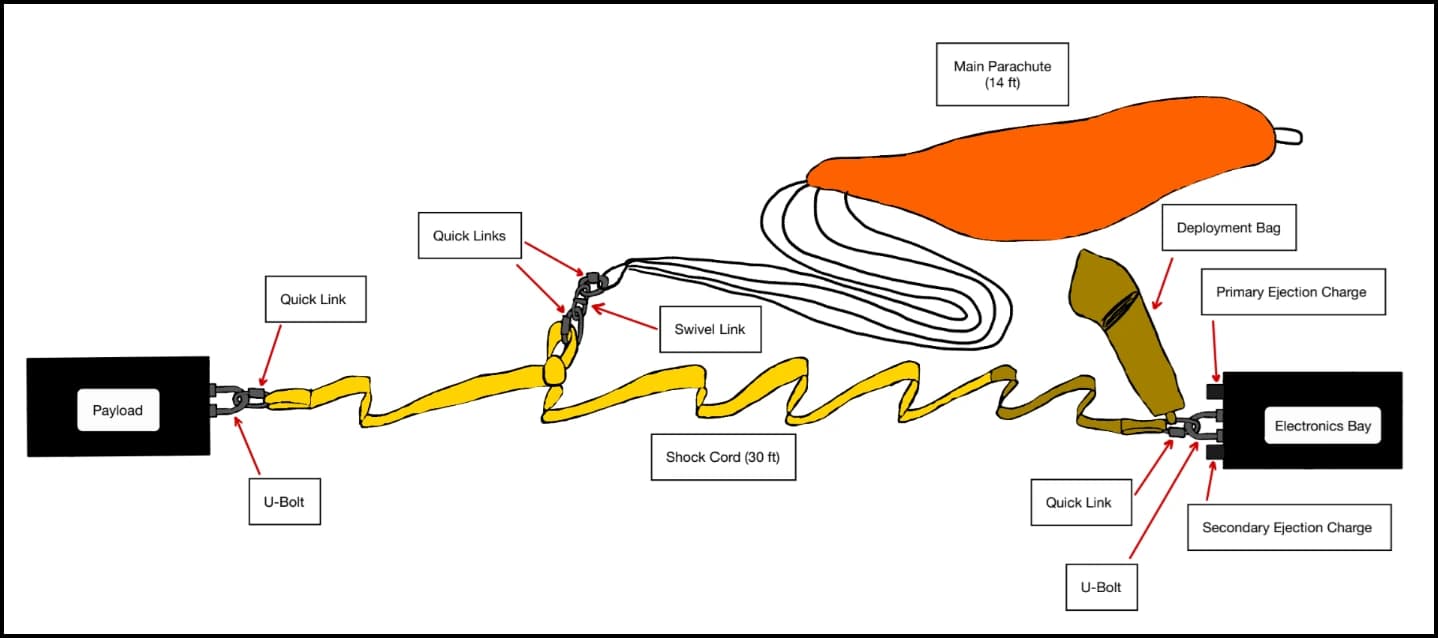
Recovery was a two-stage system: a drogue fires at apogee to stabilize descent, then the main deploys lower down to slow the rocket for a safe landing. The two schematics below are the Flight Performance subteam's deployment diagrams for Sabre I, showing the ejection charges, shock cord geometry, and hardware interfaces that had to survive a real flight without drifting outside the recovery range.
Timeline
- Oct 2023: Team proposal submitted
- Nov 2023: Accepted into Spaceport America Cup 2024
- Dec 2023: Preliminary Design Review (PDR)
- Feb 2024: Critical Design Review (CDR)
- Apr 2024: Sabre I test launch: successful launch and recovery at over 3,200 ft
- May 2024: Project Technical Report and Video Flight Readiness Review
- Jun 2024: Competition week at Spaceport America, New Mexico
Results
- 37th in the 10K COTS category and 60th overall out of roughly 120 teams at Spaceport America Cup 2024, the club's debut appearance (the team went on to take 1st place in the 10K COTS category at Spaceport America Cup 2025).
- Closed CAD-to-simulation loop for fin optimization and recovery packaging.
- Full competition deliverables shipped on schedule: PDR, CDR, test-launch report, Project Technical Report, and Video Flight Readiness Review.
- Foundation the team built on the following year (IREC 2025).
Stack notes
SolidWorks, OpenRocket, competition documentation workflows, and hands-on fabrication and testing. Reference materials and the team story live on the UVA Rocketry Team site.
Tech stack
- SolidWorks
- OpenRocket
- CAD
- aerospace